ĘČæ(zh©żn)╦╔
Ż©▒▒Š®║═└¹Ģr(sh©¬)ūįäė(d©░ng)╗»“ī(q©▒)äė(d©░ng)╝╝ąg(sh©┤)ėąŽ▐╣½╦Š�����Ż¼100176Ż®
š¬ ę¬ ×ķ┴╦Ė³║├Ą─└¹ė├╠½Ļ¢─▄�����Ż¼ūįäė(d©░ng)Ė·█ÖŽĄĮy(t©»ng)įĮüĒįĮČÓĄ─æ¬(y©®ng)ė├ė┌╠½Ļ¢─▄ąąśI(y©©)ųą�����ĪŻ╗∙ė┌┐╔ŠÄ│╠▀ē▌ŗ┐žųŲŲ„Ż©PLCŻ®Ą─╠½Ļ¢─▄ļŖ│ž░Õūįäė(d©░ng)Ė·█ÖŽĄĮy(t©»ng)�����Ż¼░³└©ė▓╝■║═▄ø╝■ā╔▓┐Ęų�����Ż¼Ųõųąė▓╝■░³└©PLC▌ö╚ļ▌ö│÷Č╦┐┌�����Īóą┼╠¢(h©żo)╠Ä└Ēå╬į¬�����Īó“ī(q©▒)äė(d©░ng)▓┐Ęų�����Ż╗▄ø╝■░³└©PLCĄ─┐žųŲ║═▒O(ji©Īn)┐ž│╠ą“ā╔▓┐Ęų�����ĪŻ╠½Ļ¢─▄ļŖ│ž░Õūįäė(d©░ng)Ė·█ÖŽĄĮy(t©»ng)╩╣╣ŌĘ³ļŖ│ž░Õ─▄īŹ(sh©¬)Ģr(sh©¬)Ė·█Ö╠½Ļ¢ĻP(gu©Īn)ššŻ¼Å─Č°ūŅ┤¾Ž▐Č╚Ą─½@Ą├╠½Ļ¢─▄�����Ż¼ėąą¦Ąž╠ßĖ▀╠½Ļ¢─▄Ą─└¹ė├┬╩║═╣ŌĘ³░l(f©Ī)ļŖŽĄĮy(t©»ng)Ą─ą¦┬╩�����Ż¼ĮĄĄ═┴╦╣ŌĘ³▓óŠW(w©Żng)░l(f©Ī)ļŖ│╔▒Š�����Ż¼Š▀ėą└Ēšō蹊┐ęŌ┴x║═æ¬(y©®ng)ė├═ŲÅVār(ji©ż)ųĄ�����ĪŻ
ĻP(gu©Īn)µIį~ LM PLC ╠½Ļ¢─▄ūįäė(d©░ng)Ė·█ÖŽĄĮy(t©»ng)
The solar panels Automatic Tracking system based on LM PLC
Fanzhansong
Ż©Beijing Hollysys Automation & Drive Ltd.,Co�����Ż¼100176Ż®
Abstract In order to make better use of solar energy, more and more automatic tracking system are used in the solar industry. The solar panels tracking system based on programmable logic controllers including hardware and software parts. The hardware input and output ports of hardware, signal processing unit, driving part; software include two parts which PLC control and monitoring program. The photovoltaic module in the system can track the sun simultaneously, then the maximum sun energy will be obtained, which has effectively improved the utilization ratio of solar energy and efficiency of photovoltaic power generation system and has reduced the cost of grid-connected PV power generation with significances of theories research and application values of applications promotion.
Key Words LM PLC Solar Automatic Tracking system
1 ę²čį
ķ_░l(f©Ī)ą┬─▄į┤║═┐╔į┘╔·┘Yį┤╩Ū╚½╩└Įń├µ┼RĄ─╣▓═¼šnŅ}�����Ż¼į┌ą┬─▄į┤ųą�����Ż¼╠½Ļ¢─▄░l(f©Ī)ļŖęč│╔×ķ╚½Ū“░l(f©Ī)š╣ūŅ┐ņĄ─╝╝ąg(sh©┤)�����ĪŻ╠½Ļ¢─▄ū„×ķę╗ĘNŪÕØŹ¤o╬█╚ŠĄ──▄į┤�����Ż¼ķ_░l(f©Ī)Ū░Š░╩«ĘųÅVķ¤�����ĪŻ╚╗Č°ė╔ė┌╠½Ļ¢┤µį┌ų°ķgŽČąį�����Ż¼╣ŌššÅŖ(qi©óng)Č╚ļSų°Ģr(sh©¬)ķg▓╗öÓūā╗»Ą╚å¢Ņ}�����Ż¼▀@ī”(du©¼)╠½Ļ¢─▄Ą─╩š╝»║═└¹ė├čbų├╠ß│÷┴╦Ė³Ė▀Ą─ę¬Ū¾�����ĪŻ─┐Ū░║▄ČÓ╠½Ļ¢─▄ļŖ│ž░ÕĻć┴ą╗∙▒ŠČ╝╩Ū╣╠Č©Ą─Ż¼▓╗─▄│õĘų└¹ė├╠½Ļ¢─▄┘Yį┤�����Ż¼░l(f©Ī)ļŖą¦┬╩Ą═Ž┬�����ĪŻō■(j©┤)£y(c©©)įć�����Ż¼į┌╠½Ļ¢─▄ļŖ│ž░ÕĻć┴ąųą�����Ż¼ŽÓ═¼Śl╝■Ž┬▓╔ė├ūįäė(d©░ng)Ė·█ÖŽĄĮy(t©»ng)░l(f©Ī)ļŖįO(sh©©)éõę¬▒╚╣╠Č©░l(f©Ī)ļŖįO(sh©©)éõĄ─░l(f©Ī)ļŖ┴┐╠ßĖ▀35%ū¾ėę�����ĪŻ
╦∙ų^╠½Ļ¢─▄Ė·█ÖŽĄĮy(t©»ng)╩Ū─▄ūī╠½Ļ¢─▄ļŖ│ž░ÕļSĢr(sh©¬)š²ī”(du©¼)╠½Ļ¢�����Ż¼ūī╠½Ļ¢╣ŌĄ─╣ŌŠĆļSĢr(sh©¬)┤╣ų▒šš╔õ╠½Ļ¢─▄ļŖ│ž░ÕĄ─äė(d©░ng)┴”čbų├�����Ż¼─▄’@ų°╠ßĖ▀╠½Ļ¢─▄╣ŌĘ³ĮM╝■Ą─░l(f©Ī)ļŖą¦┬╩�����ĪŻ─┐Ū░╩ął÷(ch©Żng)╔Ž╦∙╩╣ė├Ą─Ė·█ÖŽĄĮy(t©»ng)░┤šš“ī(q©▒)äė(d©░ng)čbų├Ęų×ķå╬▌S╠½Ļ¢─▄ūįäė(d©░ng)Ė·█ÖŽĄĮy(t©»ng)║═ļp▌S╠½Ļ¢─▄ūįäė(d©░ng)Ė·█ÖŽĄĮy(t©»ng)�����ĪŻ╦∙ų^å╬▌S╩ŪųĖāH┐╔ęį╦«ŲĮĘĮŽ“Ė·█Ö╠½Ļ¢�����Ż¼į┌Ė▀Č╚╔ŽĖ∙ō■(j©┤)Ąž└Ē║═╝Š╣Ø(ji©”)Ą─ūā╗»╚╦×ķĄ─▀M(j©¼n)ąąš{(di©żo)╣Ø(ji©”)╣╠Č©�����Ż¼▀@śė▓╗āHį÷╝ė┴╦╣żū„┴┐�����Ż¼Č°ŪęĖ·█ÖŠ½Č╚ę▓▓╗ē“Ė▀�����ĪŻļp▌SĖ·█Ö┐╔ęįį┌╦«ŲĮĘĮ╬╗║═Ė▀Č╚ā╔éĆ(g©©)ĘĮŽ“Ė·█Ö╠½Ļ¢▄ē█EŻ¼’@╚╗ļp▌SĖ·█Öā×(y©Łu)ė┌å╬▌SĖ·█Ö�����ĪŻ
Å─┐žųŲ╩ųČ╬╔ŽŽĄĮy(t©»ng)┐╔Ęų×ķé„ĖąŲ„Ė·█Ö║═ęĢ╚š▀\(y©┤n)äė(d©░ng)▄ē█EĖ·█ÖŻ©│╠ą“Ė·█ÖŻ®�����ĪŻé„ĖąŲ„Ė·█Ö╩Ū└¹ė├╣ŌļŖé„ĖąŲ„Öz£y(c©©)╠½Ļ¢╣ŌŠĆ╩ŪʱŲ½ļxļŖ│ž░ÕĘ©ŠĆ�����Ż¼«ö(d©Īng)╠½Ļ¢╣ŌŠĆŲ½ļxļŖ│ž░ÕĘ©ŠĆĢr(sh©¬)�����Ż¼é„ĖąŲ„░l(f©Ī)│÷Ų½▓Ņą┼╠¢(h©żo)�����Ż¼Įø(j©®ng)Ę┼┤¾▀\(y©┤n)╦Ń║¾┐žųŲł╠(zh©¬)ąąÖC(j©®)śŗ(g©░u)�����Ż¼╩╣Ė·█Öčbų├Å─ą┬ī”(du©¼)£╩(zh©│n)╠½Ļ¢�����ĪŻ▀@ĘNĖ·█Öčbų├�����Ż¼ņ`├¶Č╚Ė▀�����Ż¼Ą½╩Ūė÷ĄĮķL(zh©Żng)Ģr(sh©¬)ķgקįŲš┌╚šätĢ■(hu©¼)ė░Ēæ▀\(y©┤n)ąą�����ĪŻęĢ╚š▀\(y©┤n)äė(d©░ng)▄ē█EĖ·█Ö�����Ż¼╩ŪĖ∙ō■(j©┤)╠½Ļ¢Ą─īŹ(sh©¬)ļH▀\(y©┤n)ąą▄ē█E�����Ż¼░┤ššŅA(y©┤)Č©Ą─│╠ą“š{(di©żo)š¹Ė·█Öčbų├�����ĪŻ▀@ĘNĖ·█ÖĘĮ╩Į─▄ē“╚½╠ņ║“?q©▒)ŹĢr(sh©¬)Ė·█ÖŻ¼ŲõŠ½Č╚▓╗╩Ū║▄Ė▀�����Ż¼Ą½╩ŪĘ¹║Ž▀\(y©┤n)ąąŪķør�����Ż¼æ¬(y©®ng)ė├▌^ÅVĘ║�����ĪŻ
Å─ų„┐žå╬į¬ŅÉą═╔Ž┐╔ęįĘų×ķPLC┐žųŲ║═å╬Ų¼ÖC(j©®)┐žųŲ�����ĪŻå╬Ų¼ÖC(j©®)┐žųŲ│╠ą“į┌│÷ÅSĢr(sh©¬)ė╔īŻśI(y©©)╚╦åTŠÄīæķ_░l(f©Ī)�����Ż¼ę╗░ŃįO(sh©©)éõÅS╝ę▓╗ęūį┘┤╬▀M(j©¼n)ąąķ_░l(f©Ī)║═ģóöĄ(sh©┤)įO(sh©©)Č©�����ĪŻČ°īW(xu©”)┴Ģ(x©¬)╩╣ė├PLC▒╚▌^╚▌ęū�����Ż¼═©▀^PLCÅS╝ę╝╝ąg(sh©┤)╚╦åTĄ─┼Óė¢(x©┤n)�����Ż¼įO(sh©©)éõ╩╣ė├ÅS╝ęĄ─╝╝ąg(sh©┤)╚╦åT┐╔ęį║▄ĘĮ▒ŃĄ─īW(xu©”)Ģ■(hu©¼)║å(ji©Żn)å╬Ą─š{(di©żo)įć║═ŠÄīæ�����Ż¼▓óŪęPLC─▄ē“╠ß╣®ČÓĘN═©ėŹĮė┐┌�����Ż¼═©ėŹĮMŠW(w©Żng)ę▓▒╚▌^ĘĮ▒Ń║å(ji©Żn)å╬�����ĪŻ
2 ŽĄĮy(t©»ng)ė▓╝■įO(sh©©)ėŗ(j©¼)
▒ŠŽĄĮy(t©»ng)╩ŪęįPLCų„┐žå╬į¬Ą─ęĢ╚š▀\(y©┤n)äė(d©░ng)▄ē█E┐žųŲŻ©│╠ą“┐žųŲŻ®ļp▌Sūįäė(d©░ng)Ė·█ÖŽĄĮy(t©»ng)�����Ż¼ęĢ╚š▀\(y©┤n)äė(d©░ng)▄ē█EĖ·█ÖŠ═╩Ū└¹ė├PLC┐žųŲå╬į¬ŽÓæ¬(y©®ng)Ą─╣½╩Į║═╦ŃĘ©�����Ż¼ėŗ(j©¼)╦Ń│÷╠½Ļ¢Ą─īŹ(sh©¬)Ģr(sh©¬)╬╗ų├Ż║╠½Ļ¢ĘĮ╬╗ĮŪ║═╠½Ļ¢Ė▀Č╚ĮŪŻ¼╚╗║¾░l(f©Ī)│÷ųĖ┴ŅĮoł╠(zh©¬)ąąÖC(j©®)śŗ(g©░u)�����Ż¼Å─Č°“ī(q©▒)äė(d©░ng)╠½Ļ¢─▄Ė·█Öčb�����Ż¼ęį▀_(d©ó)ĄĮī”(du©¼)╠½Ļ¢īŹ(sh©¬)Ģr(sh©¬)Ė·█ÖĄ──┐Ą─�����ĪŻ
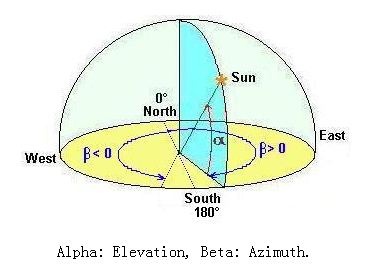
2-1 ĘĮ╬╗ĮŪĖ▀Č╚ĮŪ╩ŠęŌłDŻ║”┴-Ė▀Č╚ĮŪ ”┬-ĘĮ╬╗ĮŪ
╠½Ļ¢į┌╠ņ┐šųąĄ─╬╗ų├┐╔ęįė╔╠½Ļ¢Ė▀Č╚ĮŪ║═╠½Ļ¢ĘĮ╬╗ĮŪüĒ┤_Č©�����ĪŻ╠½Ļ¢Ė▀Č╚ĮŪėųĘQ╠½Ļ¢Ė▀Č╚�����Īó╠½Ļ¢Ė®č÷ĮŪ�����Ż¼╩ŪųĖ╠½Ļ¢╣ŌŠĆ┼cĄž▒Ē╦«ŲĮ├µĄ├ų«ķgĄ─ŖAĮŪ�����ĪŻ╠½Ļ¢ĘĮ╬╗ĮŪ╝┤╠½Ļ¢╦∙į┌Ą─ĘĮ╬╗�����Ż¼╩ŪųĖ╠½Ļ¢╣ŌŠĆį┌ĄžŲĮ├µ╔ŽĄ─═Čė░┼c«ö(d©Īng)?sh©┤)žūė╬ńŠĆĄ─ŖAĮŪ�����Ż¼┐╔ęįĮ³╦Ų┐┤ū„╩Ūśõ┴óį┌Ąž├µ╔ŽĄ─ų▒ŠĆį┌Ļ¢╣ŌŽ┬Ą─ĻÄė░┼cš²─ŽĘĮŽ“Ą─ŖAĮŪ�����ĪŻ╠½Ļ¢ĘĮ╬╗ĮŪ║═Ė▀Č╚ĮŪĄ─īŹ(sh©¬)Ģr(sh©¬)öĄ(sh©┤)ųĄ┐╔ęį═©▀^Ąž└ĒĮø(j©®ng)ŠĢČ╚�����ĪóĢr(sh©¬)ģ^(q©▒)ģóöĄ(sh©┤)└¹ė├╣½╩Įėŗ(j©¼)╦Ń│÷üĒ�����ĪŻ
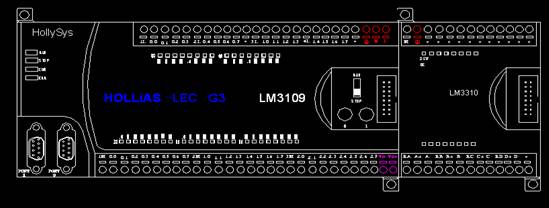
ų„┐žå╬į¬╩Ū╠½Ļ¢─▄Ė·█ÖŽĄĮy(t©»ng)Ą─║╦ą─▓┐╝■�����Ż¼ŽĄĮy(t©»ng)▀xė├ĮY(ji©”)śŗ(g©░u)Šo£ÉĪŻ┼õų├ņ`╗Ņ�����ĪóųĖ┴ŅžSĖ╗Ą─║═└¹Ģr(sh©¬)LM PLC�����ĪŻ▀xė├Ą─┼õų├░³└©LM 3108CPU─ŻēK║═LM 3310öU(ku©░)š╣─ŻēK�����ĪŻLM3108╝»│╔×ķöĄ(sh©┤)ūų┴┐24DI║═16DO�����Ż¼─▄ØMūŃę¬Ū¾�����Ż¼═©ėŹ╝»│╔ėąRS232║═RS485ā╔éĆ(g©©)═©ėŹĮė┐┌�����Ż¼RS232ė├ė┌┼c╔Ž╬╗╬─▒Š’@╩ŠŲ„═©ėŹ�����Ż¼RS485┐╔ė├ė┌ĮMŠW(w©Żng)╩╣ė├�����ĪŻLM 3310×ķ╦─═©AI─ŻēK�����Ż¼┐╔ė├ė┌▓╔╝»’L(f©źng)╦┘Ą╚▒Żūo(h©┤)öĄ(sh©┤)ō■(j©┤)�����ĪŻ┼õ║Ž║═└¹Ģr(sh©¬)HD2400L╬─▒Š’@╩ŠŲ„╩╣ė├�����Ż¼─▄ē“▒O(ji©Īn)ęĢ▀\(y©┤n)ąąĀŅæB(t©żi)�����ĪóĖ─ūāģóöĄ(sh©┤)įO(sh©©)ų├Ż¼ęį▀_(d©ó)ĄĮ┐žųŲ─┐Ą─�����ĪŻ
2-2 ŽĄĮy(t©»ng)┐žųŲį¬╝■▀xą═
▒Ē2-1ŽĄĮy(t©»ng)ą┼╠¢(h©żo)▒Ē
|
ą“╠¢(h©żo) |
ą┼╠¢(h©żo)ŅÉą═ |
▌ö╚ļ▌ö│÷ą┼╠¢(h©żo)šf├„ |
|
1 |
DI |
Ė▀Č╚ĮŪįŁ³c(di©Żn)Ž▐╬╗ |
|
2 |
DI |
Ė▀Č╚ĮŪ╔ŽŽ▐╬╗ |
|
3 |
DI |
Ė▀Č╚ĮŪŽ┬Ž▐╬╗ |
|
4 |
DI |
ĘĮ╬╗ĮŪįŁ³c(di©Żn)Ž▐╬╗ |
|
5 |
DI |
Ė▀Č╚ĮŪ¢|Ž▐╬╗ |
|
6 |
DI |
Ė▀Č╚ĮŪ╬„Ž▐╬╗ |
|
7 |
AI |
’L(f©źng)╦┘é„ĖąŲ„ |
|
8 |
DOĪ┴2 |
Ė▀Č╚ĮŪš²/Ę┤▐D(zhu©Żn) |
|
9 |
DOĪ┴2 |
ĘĮ╬╗ĮŪš²/Ę┤▐D(zhu©Żn) |
▒Š╬─╦∙įO(sh©©)ėŗ(j©¼)Ė·█Öš{(di©żo)š¹čbų├ŲõĮY(ji©”)śŗ(g©░u)╚ńŽ┬łD╦∙╩ŠŻ║╦³ų„ę¬ė╔Ąūū∙�����Īó┴ó▌S�����ĪóÖM▌S�����Īóā╔┼_(t©ói)ą²▐D(zhu©Żn)ļŖÖC(j©®)�����Īóé„äė(d©░ng)²X▌åĄ╚ĮM│╔�����ĪŻŲõųąą²▐D(zhu©Żn)ļŖÖC(j©®)1“ī(q©▒)äė(d©░ng)ÖM▌S�����Ż¼ų¦ō╬╠½Ļ¢─▄ļŖ│ž░Õ└@ÖM▌S▀\(y©┤n)äė(d©░ng)Ż¼Ė·█ÖĖ▀Č╚ĮŪ▀\(y©┤n)ąą�����ĪŻą²▐D(zhu©Żn)ļŖÖC(j©®)2“ī(q©▒)äė(d©░ng)╦«ŲĮ▌S�����Ż¼ęįĖ·█ÖĘĮ╬╗ĮŪūā╗»�����ĪŻ
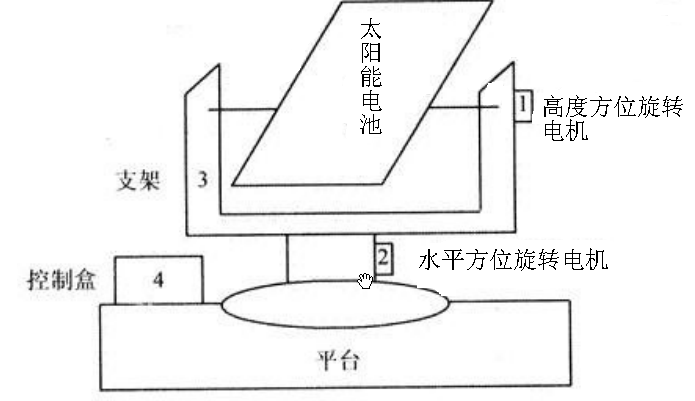
2-3 Ė·█ÖŽĄĮy(t©»ng)ÖC(j©®)ąĄĮY(ji©”)śŗ(g©░u)╩ŠęŌłD
į┌ę╗╠ņĄ─š¹éĆ(g©©)▀^│╠ųą�����Ż¼Ė·█ÖŲ„─▄ē“½@Ą├ūŅā×(y©Łu)Ą─Ė▀Č╚ĮŪ║═ĘĮ╬╗ĮŪ�����Ż¼ļŖ│ž░Õ─▄ē“Įė╩šĄĮūŅ┤¾╠½Ļ¢╚š▌Ś╔õ┴┐�����ĪŻŽĄĮy(t©»ng)ė├ę╗╠ū╣½╩Įė╔PLCėŗ(j©¼)╦Ń│÷īŹ(sh©¬)ļHĢr(sh©¬)┐╠╠½Ļ¢╦∙į┌Ą─Ė▀Č╚ĮŪ║═ĘĮ╬╗ĮŪ�����Ż¼Ė∙ō■(j©┤)īŹ(sh©¬)Ģr(sh©¬)╠½Ļ¢Ė▀Č╚ĮŪ║═ĘĮ╬╗ĮŪ┼cĖ·█Öčbų├īŹ(sh©¬)ļHĄ─Ė▀Č╚ĮŪ║═ĘĮ╬╗ĮŪĄ─▓ŅųĄ�����Ż¼ęį╝░“ī(q©▒)äė(d©░ng)čbų├Ą─▀\(y©┤n)▐D(zhu©Żn)╦┘Č╚�����Ż¼ėŗ(j©¼)╦Ń│÷ł╠(zh©¬)ąąÖC(j©®)śŗ(g©░u)Ą─Ė·█Ö▀\(y©┤n)ąąĢr(sh©¬)ķg�����ĪŻūŅ║¾═©▀^│╠ą“ł╠(zh©¬)ąą“ī(q©▒)äė(d©░ng)ļŖÖC(j©®)▀_(d©ó)ĄĮę¬Ū¾Ą─╬╗ų├�����Ż¼īŹ(sh©¬)¼F(xi©żn)ī”(du©¼)Ė▀Č╚ĮŪ║═ĘĮ╬╗ĮŪĄ─Ė·█Ö�����ĪŻ
3 ŽĄĮy(t©»ng)▄ø╝■įO(sh©©)ėŗ(j©¼)
Ė·█Ö─Ż╩ĮĄ─┼ąöÓ▀^│╠═Ļ╚½ė╔▄ø╝■īŹ(sh©¬)¼F(xi©żn)�����Ż¼ņ`╗ŅČ╚Ė▀Ż¼┐╔ęįßśī”(du©¼)▓╗═¼Ąžģ^(q©▒)║═▓╗═¼Ą─ÜŌ║“▀M(j©¼n)ąąš{(di©żo)š¹�����Ż¼Å─Č°╠ßĖ▀╣ŌĘ³ļŖšŠĄ─░l(f©Ī)ļŖą¦┬╩�����ĪŻ▀Ć┐╔ęįĖ∙ō■(j©┤)ąĶę¬į÷╝ė╣ŌÅŖ(qi©óng)é„ĖąŲ„�����Īó’L(f©źng)┴”é„ĖąŲ„Ą╚ČÓé„Ėąčbų├�����Ż¼╠ßĖ▀░▓╚½ąį║═Ė³Ė▀Ą─┐žųŲę¬�����ĪŻ
═©▀^│╠ą“┐žųŲ�����Ż¼┐╔ęįūįäė(d©░ng)┼ąöÓ╩ŪʱØMūŃ▀\(y©┤n)ąąŚl╝■Å─Č°▀_(d©ó)ĄĮūįäė(d©░ng)åóäė(d©░ng)▀\(y©┤n)ąąčbų├�����Īóūįäė(d©░ng)═Żų╣�����ĪóĘĄ╗ž│§╩╝ĀŅæB(t©żi)Ą╚┐žųŲ�����ĪŻį÷╝ė’L(f©źng)┴”é„ĖąŲ„ė├ė┌ī”(du©¼)ŽĄĮy(t©»ng)Ą─▒Żūo(h©┤)ū„ė├�����Ż¼«ö(d©Īng)’L(f©źng)┴”┤¾ė┌ę╗Č©öĄ(sh©┤)ųĄĢr(sh©¬)�����Ż¼ŽĄĮy(t©»ng)═Żų╣╣żū„�����Ż¼Å═(f©┤)╬╗ĄĮįŁ³c(di©Żn)�����Ż¼’L(f©źng)╦┘ØMūŃ╣żū„Śl╝■Ģr(sh©¬)Ż¼ŽĄĮy(t©»ng)ūįäė(d©░ng)ķ_╩╝╣żū„�����ĪŻ╠½Ļ¢─▄ļŖ│ž░Õėąā╔éĆ(g©©)ūįė╔Č╚�����Ż¼┐žųŲÖC(j©®)śŗ(g©░u)ī”(du©¼)Ė▀Č╚ĮŪ║═ĘĮ╬╗ĮŪā╔éĆ(g©©)ĘĮŽ“▀M(j©¼n)ąąš{(di©żo)š¹�����ĪŻ«ö(d©Īng)ļŖ│ž░Õ▐D(zhu©Żn)ĄĮ▒MŅ^Ģr(sh©¬)�����Ż¼ė╔ė┌Ė·█Öčbų├čb┴╦Ž▐╬╗é„ĖąŲ„�����Ż¼ĄĮŽ▐╬╗ė|³c(di©Żn)Ģr(sh©¬)ūįäė(d©░ng)ŪąöÓ▌ö│÷�����Ż¼ļŖÖC(j©®)═Żų╣╣żū„�����ĪŻ
łD3-1┐žųŲŽĄĮy(t©»ng)┴„│╠łD
4 ĮY(ji©”)šō
▒Š╬─ĮķĮB┴╦╗∙ė┌║═└¹Ģr(sh©¬)LM PLC┐žųŲĄ─ļp▌S╠½Ļ¢─▄ūįäė(d©░ng)Ė·█ÖŽĄĮy(t©»ng)�����Ż¼ŽĄĮy(t©»ng)▓╔ė├ęĢ╚š▀\(y©┤n)äė(d©░ng)▄ē█EĖ·█ÖĘĮĘ©įO(sh©©)ėŗ(j©¼)�����Ż¼īŹ(sh©¬)¼F(xi©żn)ūįäė(d©░ng)Öz£y(c©©)▀\(y©┤n)ąąŚl╝■�����Ż¼▀_(d©ó)ĄĮīŹ(sh©¬)Ģr(sh©¬)Ė·█Ö╠½Ļ¢Ą─ą¦╣¹�����ĪŻęį║═└¹Ģr(sh©¬)PLCū„×ķų„┐žå╬į¬�����Ż¼ė╔PLC│╠ą“═©▀^╦ŃĘ©ėŗ(j©¼)╦Ń│÷╠½Ļ¢īŹ(sh©¬)Ģr(sh©¬)╬╗ų├┼cŽĄĮy(t©»ng)╬╗ų├Ą─ĮŪČ╚▓Ņ�����Ż¼į┘ė╔ą²▐D(zhu©Żn)ļŖÖC(j©®)Ą─▀\(y©┤n)ąą╦┘Č╚ėŗ(j©¼)╦Ń│÷▀\(y©┤n)ąąĢr(sh©¬)ķgĪŻ═©▀^PLC│╠ą“Ą─▀ē▌ŗ┐žųŲĻP(gu©Īn)ŽĄ�����Ż¼“ī(q©▒)äė(d©░ng)ļŖÖC(j©®)▐D(zhu©Żn)äė(d©░ng)�����Ż¼▀_(d©ó)ĄĮūįäė(d©░ng)Ė·█Ö╠½Ļ¢╬╗ų├Ą─╣”─▄�����ĪŻę“┤╦╩╣Ą├įōūįäė(d©░ng)Ė·█ÖŽĄĮy(t©»ng)Ą─£╩(zh©│n)┤_ąįĖ▀�����Īó┐╔┐┐ąįÅŖ(qi©óng)�����Ż¼╝┤╩╣į┌╠ņÜŌūā╗»▒╚▌^Å═(f©┤)ļsĄ─ŪķørŽ┬ŽĄĮy(t©»ng)ę▓─▄š²│Ż╣żū„�����Ż¼╠ßĖ▀╠½Ļ¢─▄Ą─└¹ė├ą¦┬╩�����ĪŻę“?y©żn)?SPAN lang=EN-US>PLCŠ▀ėą║▄ÅŖ(qi©óng)Ą─┐╔ŠÄ│╠ąįŻ¼┐═æ¶┐╔ęįĖ∙ō■(j©┤)ūį╝║Ą─ę¬Ū¾üĒą▐Ė─ŠÄīæ┐žųŲ│╠ą“�����Ż¼▀_(d©ó)ĄĮūŅ╝čĄ─┐žųŲą¦╣¹�����ĪŻī”(du©¼)ė┌┤«�����Īó▓ó┬ō(li©ón)Ą─┤¾ą═╣ŌĘ³╠½Ļ¢─▄Ļć┴ąŽĄĮy(t©»ng)Ą─┐žųŲ�����Ż¼┐╔ęį═©▀^LM PLCĄ─═©ėŹŻ¼ĮM│╔═©ėŹŠW(w©Żng)Įj(lu©░)▀M(j©¼n)ąą╝»ųą┐žųŲ�����ĪŻė╔┤╦┐╔ęŖ╗∙ė┌║═└¹Ģr(sh©¬)LM PLCķ_░l(f©Ī)Ą─╠½Ļ¢─▄ūįäė(d©░ng)Ė·█ÖŽĄĮy(t©»ng)Š▀ėąŠ½Č╚Ė▀Īó─▄īŹ(sh©¬)Ģr(sh©¬)Ė·█Ö╠½Ļ¢ūā╗»�����Īó═©ėŹĮMŠW(w©Żng)ĘĮ▒ŃĄ╚╠ž³c(di©Żn)�����Ż¼─▄ē“ØMūŃ┐═æ¶Ą─ąĶŪ¾ĪŻ
ģó┐╝╬─½I(xi©żn)
[ 1 ] ║═└¹Ģr(sh©¬)LM PLCė▓╝■╩ųāį(c©©)
[ 2 ] ═§č®╬─.╠½Ļ¢─▄ļŖ│ž░Õūįäė(d©░ng)Ė·█ÖŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)[J].╬„▒▒┤¾īW(xu©”)īW(xu©”)ł¾(b©żo)
[ 3 ] ĻÉŠS.╠½Ļ¢─▄└¹ė├ųąĄ─Ė·█Ö┐žųŲĘĮ╩Į蹊┐[J].─▄į┤╣ż│╠








